本帖最后由 彭彭头Pavel 于 2024-5-14 22:20 编辑
本帖最后由 彭彭头Pavel 于 2024-5-7 13:03 编辑

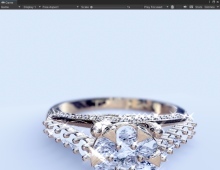
在本文中,我们将探索如何使用基于 Signed Distance Function (SDF) 的技术来创建和渲染 3D 融球角色如星之卡比或者史莱姆。我们将详细讨论以下关键技术点:
1.使用光线步进(Ray Marching)技术实现融球隐式表面
2.利用指数对数函数构建的平滑最小值函数实现形状间的融合
3.应用有限差分方法(Finite Difference)生成法线
4.实现深度写入
1. 使用光线步进(Ray Marching)技术实现融球隐式表面

// 球体的距离场函数
float4 sphereDistanceFunction(float4 sphere, float3 pos)
{
return length(sphere.xyz - pos) - sphere.w;
}
$\text{sphereDistanceFunction}(\text{sphere}, \text{pos}) = \left| \text{sphere.xyz} - \text{pos} \right| - \text{sphere.w}$
在代码示例中,我们定义了一个球体的距离场函数,其中 sphere.xyz表示球体的位置,sphere.w是球体的半径,而 pos 是当前光线步进的位置。
// 返回与所有球体的最短距离
float getDistance(float3 pos)
{
float dist = 100000;
for (int i = 0; i < _SphereCount; i++)
{
dist = smoothMin(dist, sphereDistanceFunction(_Spheres[i], pos), 15);
}
return dist;
}
我们使用 getDistance函数来计算从光线当前位置到隐式表面融球的最短距离。这通过遍历所有球体并应用 smoothMin函数来实现平滑的融合效果。
for (int i = 0; i < 20; i++)
{
// pos与融球整体的最短距离
float dist = getDistance(pos);
// 沿射线方向前进
pos += dist * rayDir;
}
此循环体中,光线从世界空间像素坐标出发,沿着摄像机到当前像素的方向逐步前进,直到达到迭代次数上限(20次)。每次循环时首先计算当前位置与融球体的最短距离,然后沿该方向步进相应距离。
 这时候对于这个像素来说可以获得的结果举例有如上图所示:
A:dist值很大甚至大于1
B:dist很小趋近于0
这时候对于这个像素来说可以获得的结果举例有如上图所示:
A:dist值很大甚至大于1
B:dist很小趋近于0
当然这只是两个比较极端的结果,举出来是方便理解,输出所有的dist值可以直观的看到结果,dist的作用是区分出融球实体部分,为其写入深度,颜色和法线作准备。
2. 利用指数对数函数构建的平滑最小值函数实现形状间的融合
float smoothMin(float x1, float x2, float k)
{
return -log(exp(-k * x1) + exp(-k * x2)) / k;
}
$\text{smoothMin}(x_1, x_2, k) = -\frac{\log(\exp(-k x_1) + \exp(-k x_2))}{k}$
功能:
对输入的x1,x2值提供一个平滑过渡的方式确定他们之间的较小值。确定最小值我们比较常用的是Min函数,但是它会有一个突变点,而smoothMin函数能提供一个平滑的曲线。
效果:
当k值接近于0时,平滑效果最明显,接近在x1和x2之间的软最小值。
当k值较大时,结果趋近于传统的min(x1,x2)函数。

3. 应用有限差分方法(Finite Difference)生成法线

// 计算法线
float3 getNormal(float3 pos)
{
float d = 0.0001;
return normalize(float3(
getDistance(pos + float3(d, 0.0, 0.0)) - getDistance(pos + float3(-d, 0.0, 0.0)),
getDistance(pos + float3(0.0, d, 0.0)) - getDistance(pos + float3(0.0, -d, 0.0)),
getDistance(pos + float3(0.0, 0.0, d)) - getDistance(pos + float3(0.0, 0.0, -d))
));
}
使用中心差分方法来估算形状函数在 x、y、z 三个方向上的偏导数,
$\frac{\partial F}{\partial x} \approx \frac{F(p+d\mathbf{i}) - F(p-d\mathbf{i})}{2d}$
$\frac{\partial F}{\partial y} \approx \frac{F(p+d\mathbf{j}) - F(p-d\mathbf{j})}{2d}$
$\frac{\partial F}{\partial z} \approx \frac{F(p+d\mathbf{k}) - F(p-d\mathbf{k})}{2d}$
将这些导数构成一个向量。即可得到未归一化的法线向量 n:
$n = \left( \frac{F(p+d\mathbf{i}) - F(p-d\mathbf{i})}{2d}, \frac{F(p+d\mathbf{j}) - F(p-d\mathbf{j})}{2d}, \frac{F(p+d\mathbf{k}) - F(p-d\mathbf{k})}{2d} \right)$
最后,归一化词向量得到单位法线向量
$n_{\text{unit}} = \frac{n}{|n|}$
由于我们只需要取得方向向量,所以在程序中可以省略掉除以 2d的计算。
 功能:
如上图所示输入形状上的点
功能:
如上图所示输入形状上的点 P的坐标 (AX,AY),和最小差分的值 d,分别计算x和y方向上的变化率,再将两个向量相加再做归一化得到法线向量。
效果:
d值的效果在shader中呈现出来的现象是0.0001时这种微小的偏移会使法线计算准确,但是在ggb中需要 d值很大才会有比较精确的效果,所以 d值在函数中对结果到底起到了什么影响作用呢?
有一种可能在ggb中过小的d值导致法线不精确是精度问题。
4. 实现深度写入

// 计算深度
inline float getDepth(float3 pos)
{
const float4 vpPos = mul(UNITY_MATRIX_VP, float4(pos, 1.0));
float z = vpPos.z / vpPos.w;
#if defined(SHADER_API_GLCORE) || \
defined(SHADER_API_OPENGL) || \
defined(SHADER_API_GLES) || \
defined(SHADER_API_GLES3)
return z * 0.5 + 0.5;
#else
return z;
#endif
}
将RayMarching击中融球体的像素位置坐标从世界空间转换到观察空间,除以的 vpPos.w值获得透视变化后的深度 z。再匹配不同图形接口的深度值范围。
output frag(Varyings i)
{
output o;
......
for (int i = 0; i < 20; i++)
{
float dist = getDistance(pos);
......
if(dist < 0.01)
{
......
o.depth = getDepth(pos); // 写入深度
}
// 沿射线方向前进
pos += dist * rayDir;
}
// 如果没有发生碰撞,则设置为透明
o.col = 0;
o.depth = 0;
return o;
}
在循环体中,每次迭代都会检测是否发生碰撞,若光线步进的位置与融球形状的最短距离小于0.01,则写入深度值,否则深度保持为 0。这样确保了只有当光线确实击中目标物体时,才记录深度信息。
在下篇中将详细讲解各种融球材质效果的实现。
5. 参考